人形机器人:AI最有前景落地方向,低价批量供货者为王
人形机器人是AI最有前景的落地方向之一,在工业、商业、家庭、外太空探索等领域具有广阔应用场景。目前,国内外重量级玩家不断增多,特斯拉、小鹏、小米等公司均已入局。预计这一产业迭代成熟之后,所对应的年度市场规模达到数万亿元,其产业链值得深入研究。
01
人形机器人的发展路径
机器人采用人形设计,是出于多种因素考量。一是环境适应性,现实中许多场景(如楼梯、工具等)均是根据人体工学设计的,人形机器人能够直接适用。二是任务通用性,人体具备较高灵活度,模仿人类的关节、感官系统,让人形机器人更加灵活,可执行多样化任务。三是社会接受度,类人外观可以降低人机交互的心理隔阂。四是数据可得性,深度仿生意味着可以从人身动作中获取大量的运动数据,能够明显降低深度强化学习等训练方法的难度和训练时间。
特斯拉人形机器人擎天柱(Optimus)即坚持仿人结构:一是外形坚持仿人设计;二是结构上,关节通过非线性结构来实现对不同形态下压力、扭矩的控制,进而实现流畅动作,在执行器连接中使用模仿肌腱的弹簧设计,手部形态上模仿人类手掌,从而实现高灵敏度,以抓取重物和轻薄物体。

人形机器人研究,起步于对人类双足行走的模仿。1969年,日本早稻田大学加藤一郎教授率先解决了人形机器人的双足行走问题,揭开了人形机器人研究的序幕。
行走机构的设计以及相应控制方法的解决,推动着人形机器人迈向自主式完成任务。1973年,加藤一郎等人在其研发的代号为WL-5的双足机器人基础上,配置了机械手以及人工视觉、听力装置,组成了自主式机器人WAROT-1,人形机器人的研究也逐渐扩展到人工智能方面。
1990年以来,机器人的行走能力、智能化和功能越来越强大,本田公司的仿人机器人ASIMO是行业的典范。
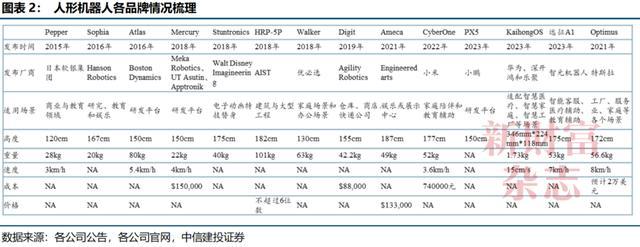
2010年以来,互联网的发展推动人形机器人受到更多大众关注,技术也愈发成熟。2015年,Pepper的市售是人形机器人走入大众市场的重大尝试。2021年,波士顿动力发布旗下人形机器人Atlas的跑酷视频,即刻收获百万点赞。电动车巨头特斯拉也于2021年宣布,将推出人形机器人产品Optimus,至此,人形机器人批量生产的商业化时代拉开序幕。
2025年1月9日,特斯拉CEO马斯克在国际消费类电子产品展览会(CES 2025)的连线采访中提到,未来,人形机器人的数量可能是人类的几倍;2025年,特斯拉将生产数千台Optimus人形机器人用于内部工厂测试,如果测试顺利,那么2026年产量会提升10倍。
国内重量级玩家也不断增多,小鹏、小米等公司均已入局人形机器人领域。
2016年,优必选原型机诞生,其腿部拥有12个自由度,可实现多种场景下的行走。2021年,其研发的机器人Walker X发布,优必选对其视觉定位导航和手眼协调操作技术进行了全面升级,使之可以更生动地与人交互,还学会了下象棋。
2022年8月,小米首款全尺寸人形仿生机器人CyberOne(铁大)正式亮相。
2023年10月,小鹏推出了自研的人形态双足机器人PX5。2024年11月6日,其自主研发的AI人形机器人Iron亮相。
此外,华为等公司也在积极布局这一领域。2023年6月19日,东莞极目机器有限公司成立,该公司由华为技术有限公司全资持股,注册资本为8.7亿元。
AI时代,人形机器人有望加快实现商业化落地,但其研发中仍存在不少难点。
02
本体发展的五大痛点
当前,智能机器人的本体仍然存在几大发展痛点,主要体现在“大脑”泛化能力、垂类数据、结构设计、供应链成本等多个方面。
一是“大脑”泛化能力有限,导致当前智能机器人的应用场景受限。“大脑”能力影响机器人能力的上限,在机器人产业链中具有重要地位。为此,各个厂商都为自己的具身智能发展配备了优越的大模型,如美国初创机器人公司Figure和挪威人形机器人公司1X Technologies均曾采用OpenAI的大模型进行任务处理。目前,具身大模型快速迭代,但从效果来看,其在泛化能力等方面的发展仍有较长的路要走。人形机器人在单一任务的泛化能力方面已取得较好进展,但是,多任务、跨任务的泛化能力仍然相对较弱,影响其落地应用。
二是在具身大模型还没有足够泛化、成熟之前,结构化场景的垂类模型可以与具身大模型相向而行,加速具身智能的落地。现阶段,部分企业尝试将应用场景做封闭,即把作业场景分为若干约束条件,形成一个封闭的作业域,在其中实现泛化,这样,其数据规模要求将显著下降。这一方式和世界模型的发展是相向而行的路线,随着具身大模型泛化能力逐步提升,场景的切割也可以更宽泛。

三是数据重要性凸显,垂类数据采集方兴未艾。数据是具身智能的“认知基石”,具身智能要实现“感知-思考-行动”的闭环,数据是其中的核心输入。一方面,具身智能体通过多种传感器采集实时数据,可以构建动态环境的三维表征;另一方面,智能体在与物理世界的交互中产生的轨迹数据等可以转化为行为经验,用于优化后续决策逻辑。同时,数据是具身智能算法迭代的核心驱动力,大规模的数据用于模型训练等可以提升智能体的泛化能力,有助于实现其在未知场景中的自适应调整行为。
目前,通用机器人大模型所需数据量极为庞大、获取难度高,导致短期内难以采集足够数量的真机数据用于大模型训练;同时,常规的视觉语言动作模型(VLA)架构也难以利用大规模人类以及跨本体的操作视频数据,目前,业界主要采用仿真数据和互联网的图文数据来训练机器人。
四是机器人结构设计仍需优化,零部件可靠性、电池续航等问题亟待解决。2025年4月,2025北京亦庄人机共跑半程马拉松在北京南海子公园开跑。半马是对机器人关节结构设计、热管理、电池续航、控制算法、通信干扰、软硬件耦合等方面的综合性考验。比赛途中,多数选手出现运动失衡、摔倒等现象,稳定性较差,同时暴露出散热问题,需不断喷洒冷却液进行降温。此外,人形机器人目前续航能力有限,大多数集中在2-5小时,难以满足家庭服务、工业协作等场景的持续作业需求。
以散热和续航为例,机器人的高功率电机、密集的电子元件在持续工作时均会产生大量热量,尤其是在高速持续运动或重载工况下,热量积累速度很快。而由于人形机器人设计为仿人结构,其内部空间紧凑,热量难以快速散发,此类问题仍待解决。
五是供应链成本较高,硬件价格仍需进一步下降。由于人形机器人量产的规模有限,相关的零部件需求暂未完全释放,而部分零部件此前由于应用场景有限价格较为昂贵,如精密传感器、行星滚柱丝杠等,未来,有赖于供应链环节的进一步降本。
诸多痛点的解决,有助于推动人形机器人产业规模进一步扩大。
03
厂商各有突破,主要技术参数水平存在差异
当前,人形机器人赛道玩家众多,其发展各有侧重,推动产品快速迭代、性能持续提升,而不同产品的各项性能参数、商业化进度也存在差异,一些厂商在部分方向进步显著。
一是运动控制。目前,人形机器人已具备一定的复杂运动能力,如宇树科技G1机器人可以实现流畅的侧空翻动作,并且在拳击比赛中被打击后迅速恢复平衡,展现出了较好的运动性能。但是从整个行业的角度来看,运动控制仍有发展空间,机器人在运动速度、姿态稳定度上仍需进步。
二是环境感知。通过激光雷达、视觉传感器和惯性测量单元(IMU)的多模态融合,机器人能够实时识别地形等外部环境变化,并动态调整其步幅与重心,实现运动稳定性。以推出能跑半马的人形机器人的松延动力为例,其研发的N2机器人依赖多模态传感器融合,通过仿生足底传感器、激光雷达和视觉SLAM实现复杂地形导航,并且,其动态抗干扰算法也可以应对外部突发干扰。
以特斯拉的人形机器人为例,在特斯拉的2021年AI日活动上,其展示的机器人Tesla Bot外形设计接近人类平均身材,全身采用轻量化材料,面部有一个重要信息显示屏。它的四肢依靠40个机电执行器进行操作,其中手臂12个、颈部2个、躯干部2个、手部12个、腿部12个。此外,它具有人类级仿生手,脚部为2轴平衡设计,有力反馈感应,可以实现平衡和敏捷的动作。
2023年12月,特斯拉发布第二代通用人形机器人Optimus Gen2,其机械结构进一步优化,整机重量减轻10公斤,并能够实现更灵活的肢体运动。在运动性能方面,其行走速度提升30%,新增深蹲等复杂动作能力;平衡系统优化,具备动态环境适应能力。Optimus Gen2的单手自由度仍然是11个,但是响应速度和执行速度更快,其中,手指部分使用了全手指触觉传感器,帮助人形机器人实现精细化操作。根据特斯拉的展示视频,Optimus Gen2手部活动更加连贯拟人,灵巧手能够执行精细操作,精准抓握细小易碎物品,如搬运鸡蛋、二指拿鸡蛋等。
目前,特斯拉尚未正式发布Optimus Gen3,但从此前会议信息预计,其灵巧手将显著升级,预计有22个自由度。
国产人形机器人方面,我们以星动纪元推出的星动STAR1为例。该公司产品经过多次迭代升级,于2024年8月推出了首款产品级高性能人形机器人星动STAR1。星动STAR1全身共有55个自由度,具有业界先进的动态性能。其最高关节扭矩达400Nm,最高转速达25rad/s,室外真实场景奔跑速度达3.6m/s,配合腰部的3个自由度,可以轻松完成自然步态下的稳定行走、奔跑、跳跃等复杂运动。
星动STAR1上肢为公司自主研发,具有7个自由度的高精度仿生机械臂,其高性能灵巧手星动XHAND1具有12个全主动、全自驱的自由度。其在精细操作任务领域具有业界先进的执行机构,能适应多种场景应用需求。
星动STAR1集成了英特尔高性能处理器和英伟达系统级芯片Orin的计算资源,为人形机器人在强化学习、模仿学习和端到端大模型研究中提供算力支持。此外,该机器人还配备了指尖阵列式触觉传感器、深度视觉相机、麦克风阵列和面部交互屏幕等多种外设。
产品的进步,体现到了应用端。目前,人形机器人主要应用于科研教育、智慧引导、数据采集等场景,以及焊接、分拣、搬运等工业场景,同时,康养护理、家庭服务等消费端场景也是其积极拓展的重要方向。目前,行业正在陆续释放批量订单,如智元机器人、宇树科技中标中移(杭州)信息技术有限公司2025年至2027年人形双足机器人代工服务采购项目,总标包1.24亿元,分别为智元7800万(含税)、宇树4605万(含税)。批量订单预示着,人形机器人在终端商业场景的探索逐步进入落地阶段。
04
执行系统和核心零部件
人形机器人包含人机交互、环境感知、运动控制三大核心能力,使得它们像人一样具有感知、学习和与环境动态交互的能力。其中,执行系统是运动控制的核心组成部分,其发展又涉及不同的核心零部件。
人形机器人的执行系统主要指其躯干的关节模组和灵巧手,前者主要包括旋转关节和线性关节。从驱动和传动方案设计看,旋转关节常采用“电机+减速器”,线性关节多采用“电机+丝杠”。目前,特斯拉、小鹏等厂商采用“旋转+线性关节”方案,而Figure、智元、宇树等厂商的部分机器人则采用全旋转方案。
以特斯拉产品为例,根据特斯拉在2022年AI日展示的细节,Optimus拥有40个机电执行器,其中,躯干8个、腿部12个、手臂8个、手部12个。其“躯干+腿部+手臂”的28个执行器,包括14个旋转执行器、14个线性执行器。
Optimus的14个旋转执行器,按照扭矩不同分为20Nm、110Nm、180Nm三类。从结构来看,旋转执行器包括无框力矩电机、谐波减速器、机械离合器、无接触力矩传感器、输入及输出位置传感器、交叉滚子轴承、角接触球轴承等。从工作原理来看,旋转执行环节主要包括三个:第一,电机是动力输入源,其中永磁体(转子)发生旋转运动;第二,电机产生的动力经过谐波减速机转换,实现了降低转速、增大扭矩的目的,可满足驱动负载的要求;第三,谐波减速器输出端通过交叉滚子轴承连接至输出轴,以实现部分关节的旋转运动。在此过程中,无接触力矩传感器测量输出扭矩,输入、输出位置传感器用于测量位置和速度,并实现及时的反馈,便于进行精确的控制;机械离合器主要实现传动通断状态的切换。此外,也有诸多厂商的旋转执行器采用行星减速器方案,主要用于机器人下肢。
Optimus的14个线性执行器,牵引力分别为500、3900、8000N,主要在受力要求较大的部位,包括腕部、踝部的俯仰(pitch)、偏航(yaw)角,髋部、肘部、膝部的俯仰(pitch)角。从结构来看,包括无框力矩电机、行星滚柱丝杠、力传感器、四点接触轴承、球轴承、位置传感器。从工作原理来看,以膝盖处为例,行星滚柱丝杠处于人形机器人的“大腿”位置,当腿需要伸直时,丝杠收缩,拉动A点,通过其他连杆,小腿即可伸直。力传感器和位置传感器负责采集、反馈、矫正,使控制更精准。
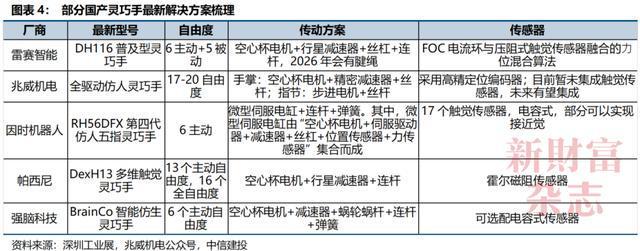
目前,市场上灵巧手的驱动方案、传动方案等存在多种选择。
以特斯拉灵巧手为例,2024年10月11日,特斯拉在We Robot会议结束后展示了第三代Gen 3灵巧手模型。根据展示视频,该灵巧手共有22个自由度,其食指、中指、无名指分别具有4个自由度,拇指以及小指分别具有5个自由度。具体来看,每根手指有三个关节,分别是远端关节(DIP)、中间关节(PIP)、近端关节(MCP),其中,DIP和PIP具有一个自由度,可以弯曲和伸展,MCP具有两个自由度,可以弯曲伸展以及内收和外展。
Optimus Gen 3灵巧手的灵活度较前一代提升明显。其在每个手指环节增加了远端关节和中间关节自由度,近端关节增加了外展和内收自由度。此外,在小指处,增加了一个转轴,使得该灵巧手具备2个对掌关节(Opposition)。目前,行业中大部分灵巧手都是使用一个对掌关节(即拇指的对掌关节),双对掌关节的设计使得Optimus新一代灵巧手小指拥有更高的灵活度,有利于自适应抓取和手内操作潜力的进一步发掘。
Optimus Gen 3灵巧手运动系统预计主要包括线性执行器模块和腱绳模块。根据特斯拉展示视频和腱驱动相关学术研究,我们判断,其驱动系统包括线性执行器模块及腱绳模块,其中,线性执行器模块预计为“电机系统+丝杠”或者“电机系统+减速器+丝杠”的方案,腱绳模块预计包括腱绳导管、腱绳、腱张力传感器、腱端连接器等部件。
近年,国产灵巧手也密集发布,产业加速发展。2024年下半年以来,已有因时机器人、兆威机电、帕西尼、雷赛智能、永创智能、速腾聚创、江苏雷利等多家企业发布灵巧手新产品,整体价格段更加灵活,面向场景更加丰富。
电机:为人形机器人提供驱动力
人形机器人的运动,离不开电动机。根据功能与用途差异,电动机可分为驱动电机与控制电机两大类。伺服电机、步进电机便是典型的控制电机,前者控制精度相对更高。
人形机器人电机需要满足高效率、高动态和高功率密度的要求。高效率方面,机器人通常由电池供电,需要经受得起苛刻的运行条件,可进行十分频繁的正反向和加减速运行,并能在短时间内承受过载,因此,低能耗和低摩擦损失很重要。高动态方面,整个驱动器的惯性应尽可能低,电动机从获得指令信号到完成指令所要求的工作状态的时间应短。高功率密度方面,机器人应用需要高速、高扭矩电机,电机还需要小巧、紧凑、轻巧。根据这些应用要求,我们判断人形机器人电机应以控制电机为主,尤其是对于运动控制更加精确的伺服电机有望得到更多应用。
Optimus Gen2主要应用两类特殊的伺服电机,即无框力矩电机和空心杯电机。无框力矩电机具有高紧凑度、高效率及转速、低噪音、高稳定性及低维护四大特点。其由独立的转子和定子部件组成,可以和安全制动器、编码器构成一个无框力矩电机模组。空心杯电机是一种特殊结构的直流电机,具有效率高、灵敏度高、运行稳定、控制性强等特点。
编码器:实现电机位置与速度反馈,助力精准运动控制
编码器主要用来测量磁极位置和电机转角及转速,其分辨率对电机系统的控制精度具有重要影响。编码器在电机系统中成本占比并不高,以伺服系统为例,编码器占其成本比例约为11%,但其对电机的定位精度、速度稳定性、功率损耗和安全性都有重要影响。
减速器:实现动力传动的重要部件
减速机是工业动力传动不可缺少的重要基础部件之一,可能应用于人形机器人领域的减速器,主要包括谐波减速器、精密行星减速器、RV减速器等。
轴承:支撑旋转体,助力精准传动
轴承可分为滚动轴承和滑动轴承两类。
精密滚动轴承为机器人执行系统的关键零部件,对机器人减速器的承载能力、回转精度、运转平稳性、重复定位精度等性能起到重要作用。机器人轴承普遍安装在有限的空间,必须体积小、重量轻,也就是轻量化。同时,机器人的高载荷、高回转精度、高运转平稳性、高定位速度、高重复定位精度、长寿命、高可靠性的性能,要求配套的轴承必须具备高承载能力、高精度、高刚度、低摩擦力矩、长寿命、高可靠性的性能。
特斯拉人形机器人执行系统中应用多个轴承,比如,其旋转执行器中使用了角接触球轴承、交叉滚子轴承,线性执行器使用了球轴承和四点接触轴承。
丝杠:线性执行器重要部件,模拟人体肌肉功能
丝杠是一种将电机端旋转运动转化为直线运动的机械部件,“滚珠/柱丝杠+旋转电机”的组合应用广泛。
工业母机多采用滚珠丝杠,承载冲击更强的滚柱丝杠在人形机器人领域有望得到大规模应用,尤其是螺纹滚柱环绕主丝杠形成行星式布局的行星滚柱丝杠。人形机器人需要具备高承载、耐冲击等性能,所以,行星滚柱丝杠需要有更大的接触面积、更大的直线速度、更小的振动和噪音。
人形机器人线性执行器主要采用“电机+行星滚柱丝杠+轴承+传感器”架构实现,反向行星滚柱丝杠是核心部件之一。
05
产业链价值量及发展趋势
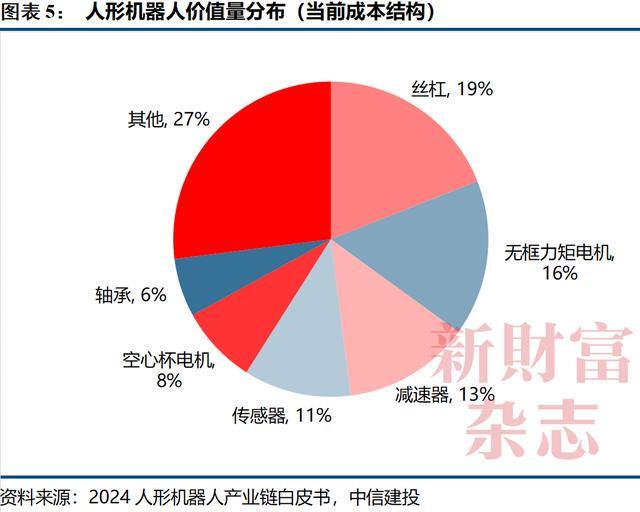
根据《2024人形机器人产业链白皮书》,当前,人形机器人的成本结构中,三大执行器(线性执行器、旋转执行器、灵巧手)占主要零部件价值量的73%,主要由丝杠、无框力矩电机、减速器、力传感器、空心杯电机及轴承构成。首先是丝杠,为其中的核心零部件之一,约占人形机器人价值量的19%,往后依次为无框力矩电机(16%)、减速器(13%)、传感器(11%)、空心杯电机(8%)。
我们以特斯拉人形机器人为蓝本,结合产业中的主流产品及主流方案,测算得出:当前,人形机器人传感器单体价值量为2.3万元左右,且触觉、视觉等领域要求在不断提高,价值量呈现增加态势。
视觉、六维力传感器、触觉为兼具高价值和高壁垒的方向。从价值量来看,视觉传感器占到31%,六维力矩传感器占比26%,触觉传感器占到13%。

供应链降本是行业发展的必然趋势,按照特斯拉远期对人形机器人的定价目标,以及近期国产人形机器人的定价,我们认为,未来人形机器人整机成本可能在8万元左右,甚至更低。这意味着,随着量产阶段的不断推进,供应链各类参与者的报价都将持续下降。未来,人形机器人行业的供应链将像汽车一样,参与者能否低价批量供货,将成为其核心竞争力。
我们将人形机器人量产分为三个阶段:阶段一是量产前,产业链还不完善,各零部件报价主要参考市场价格;阶段二是开始量化,产业链还没有完全成熟,但是各零部件生产工艺改进优化,报价较过往大幅降低;阶段三是大批量化生产,产业链已经成熟,各零部件按照规模生产行业合理利润率进行报价。我们预计,零部件未来单价普遍在千元之内甚至更低,但是市场空间将得到几何级放大。
具体来看,从关节方案选型来看,是选择线性执行器还是旋转执行器,负载、成本、精度等为重要考量因素。两类执行器各具优劣势,需根据机器人产品定位、综合成本、工作场景等因素选择。我们认为,二者的优劣势仍在变化当中,如丝杠的降本速度有望加快,或新型材料出现会增强减速器的扭矩密度,以及新工艺路线的出现(如磁驱等),这些都会影响本体厂商的选择。但整体来看,我们认为,线性关节具有精度高、承载力大、传动效率高等优势,伴随着国内丝杠厂商快速降本,未来,其在人形机器人关节模组中的占比将相对提升。
灵巧手、传感器应用场景不拘泥于人形,有望加速放量。一方面,灵巧手是人形机器人与外界交互的重要执行器,随着特斯拉发布人形机器人量产展望,灵巧手有望放量,微型丝杠、腱绳模块和传感器需求有望大幅增加。另一方面,灵巧手可以不依附人形机器人独立存在,能够有效替代电动夹爪等末端执行器,远期市场容量有望进一步扩大,越来越多的零部件供应商将切入灵巧手领域。

传感器是具身智能包括人形机器人与物理世界交互的关键,是使得具身智能体更智能化、通用化的重要载体。从价值量拆分来看,视觉传感器占到30%,六维力矩传感器占比25%,触觉传感器占到17%,为价格及壁垒俱高的方向。
其中,视觉传感器具备技术参数要求高、价值量大、竞争格局相对稳定等特点,为确定性较高的方向。
六维力矩传感器从航天、医疗等行业发展而来,当前正经历快速降本阶段,我们认为,在关注技术积淀的同时,应重视各大企业降本途径,包括贴片、标定设备的自动化程度,以及规模化生产能力。
触觉传感器使用面积有望逐步增大,产品精度要求亦将不断提升,是具身智能包括人形机器人智能化的重要媒介。当前,压阻式、电容式、电磁式等技术路径呈现百花齐放的特征,技术路线尚未收敛,成本、精度、工艺为后续重要观察方向。
本文所提及的任何资讯和信息,仅为作者个人观点表达或对于具体事件的陈述,不构成推荐及投资建议,不代表本社观点。投资者应自行承担据此进行投资所产生的风险及后果。